Taxonomie des protocoles de routage
Récemment, les protocoles de routage pour les RCSF ont été largement étudiés, et différentes études ont été publiées. Les méthodes employées peuvent être classifiées suivant plusieurs critères comme illustré sur la figure suivante :
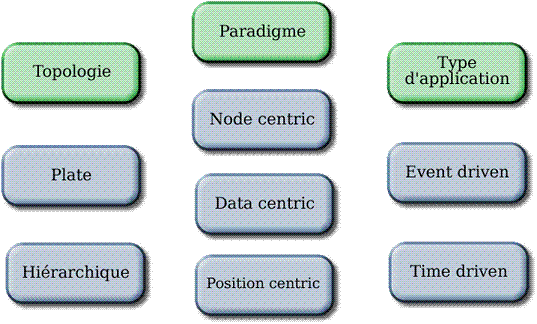
La topologie détermine l'organisation des capteurs dans le réseau. Il existe deux principales topologies dans les protocoles de routage pour les RCSF.
-
Topologie plate : dans une topologie plate, tous les noeuds possèdent le même rôle. Les noeuds sont semblables en termes de ressources.s
-
Topologie hiérarchique : afin d'augmenter la scalabilité du système, les topologies hiérarchiques ont été introduites en divisant les noeuds en plusieurs niveaux de responsabilité. L'une des méthodes les plus employées est le clustering, où le réseau est partitionné en groupes appelés "clusters". Un cluster est constitué d'un chef (cluster-head) et de ses membres.
Dans les RCSF, il existe trois paradigmes de communication :
-
Node centric : ce paradigme est celui employé dans les réseaux conventionnels, où les communications se basent sur l'identification des noeuds participants, qui se fait à l'aide d'adresses IP.
-
Data centric : dans un RCSF, la donnée est plus importante que le noeud lui-même, ce qui rend son identification inutile. Dans le paradigme data centric, les communicants sont identifiés par leurs données, et donc tout le système (routage, interrogation, . . . etc) doit être régit par cette propriété. Ainsi, le système peut être vu comme une base de données distribuée, où les noeuds forment des tables virtuelles, alimentées par les données captées.
-
Position centric : dans cette approche, les positions des noeuds représentent le moyen principal d'adressage et de routage. Dans certaines applications, il est plus intéressant d'interroger le système en utilisant les positions des noeuds, que leurs adresses IP. Dans ce cas, le routage s'effectue grâce à des techniques géométriques afin d'acheminer l'information d'une zone géographique vers une autre.
La méthode de captage des données dans un RCSF dépend de l'application et de l'importance de la donnée. De ce fait, les RCSF peuvent être catégorisés comme time-driven ou event-driven.
-
Application time-driven : un réseau time-driven est approprié pour des applications qui nécessitent un prélèvement périodique des données. Par exemple, cela est utile dans des applications de monitoring (feu, météo) afin d'établir des rapports périodiques.
-
Application event-driven : dans des applications temps réel, les capteurs doivent réagir immédiatement à des changements soudains des valeurs captées. Un prélèvement périodique des données est inadapté pour ce type de scénarios. Pour cela, le protocole doit être réactif et doit donner des réponses rapides à l'occurrence d'un certain nombre d'évènements.
")